


濟南融恩機電設備有限公司 手機:13905314198 座機:0531-85960083常城
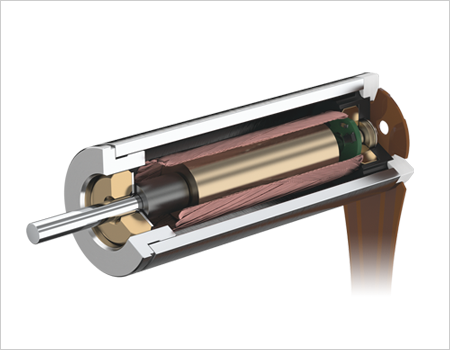
1224N012SR德瑪莎水光儀專用電機

采用三相自持繞組和非磁性鋼材料外殼的創造性設計,使 電機性能更加優異。無靜態駐留推力和線性化的電流- 推力特性, 使 QUICKSHAFT? 成為微型定位控制的理想選擇。通過電機內置霍爾傳感器,使 QUICKSHAFT? 直流無刷伺 服直線電機實現位置控制。
FAULHABER 微型電機(micro-motor),是體積、容量較小,輸出功率一般在數百瓦以下的電機和用途、性能及環境條件要求特殊的電機。全稱微型特種電機,簡稱微電機。常用于控制系統中,實現機電信號或能量的檢測、解算、放大、執行或轉換等功能,或用于傳動機械負載,也可作為設備的交、直流電源。
本文首先介紹了虛擬現實技術中力覺交互技術的概念以及研究現狀,探討了目前在領域內實現人機力覺交互的方法和原理。然后,本文面向虛擬現實技術在醫學上的應用領域,針對虛擬對力覺交互技術的具體要求,設計一款可實現五自由度運動并滿足相應力反饋要求的力覺交互設備,以期構建出一個可以通過視覺、聽覺、力覺多感知通道進行人機交互的虛擬現實系統,用于實現對實際過程的逼真模擬。本文主要部分是對面向虛擬的力反饋設備的研究與開發,包括設備整體設計原則和指標的確定、驅動執行元件和傳感器的選擇、機械結構的設計與制造、設備的機構分析、設備整體裝配與調試。凝汽器在線除垢機器人專用faulhaber電機投送裝置研究凝汽器是工業領域廣泛應用的冷卻和換熱設備,凝汽器的工作狀態對于整個系統的冷卻和作業具有至關重要的作用,然而凝汽器中水垢的產生會嚴重影響凝汽器的換熱效果,極大程度地降低系統的工作效率。
同時,通過對具有12路信號的遙控模塊進行設計改造,實現18路信號輸出,用于機器人專用faulhaber電機遙控操作。研究組織級軟件的功能,確定主控機軟件功能模塊。采用VC6.0程序設計了軟件主界面、串口通信界面和圖像處理界面,實現了串口通信的部分功能。對圖像傳輸的方法和主要問題進行了研究分析。研究執行級單片機程序功能,編寫了主程序、串口通信程序和跨越懸垂線夾程序。對于遙控模塊程序,提出了一種利用軟件二次譯碼實現通路擴展的方法,設計程序流程圖,編寫程序。通過對上述控制系統的調試與實驗,證明基于PCM-3370主板的計算機系統的運行具有良好的穩定性和流暢性;無線遙控模塊收發信號具有較高的可靠性和通道擴展的可行性。
1224N012SR德瑪莎水光儀專用電機供應商上海羅文動力系統有限公司是一家專業從事工業傳動控制產品銷售、服務的高科技公司,公司擁有高素質的管理隊伍和雄厚的技術實力,自成立以來,都以“誠信經營、質量第一、優質服務”的經營方針和文化理念,為客戶提供好的性價比的產品和周到的服務,從而贏得客戶的一致贊賞。公司與及著名廠商建立了長期穩定的技術和商務合作關系,整合優勢品牌資源,為廣大客戶提品信息及技術支持,共同推進自動化發展進程。真誠期待能與貴司通力合作,希望我們的努力能贏得您的信任與支持!歡迎廣大客戶來電咨詢及詢價。

使用新型 FAULHABER運動控制器,您可通過循環模式的CSP、CSV和CST輕松地同步控制多個軸。已針對FAULHABER驅動程序進行優化。
針對偏癱的進程提出進階交互式上肢訓練策略。早期采用基于表面肌電信號的自主性被動訓練,訓練方式為健側上肢控制患側上肢,達到雙臂鏡像協調訓練的目的。中后期采用基于關節力矩信號的主動訓練。后基于5DOF外骨骼式上肢機器人專用faulhaber電機平臺,以多個受試者進行實驗研究,實驗結果一方面驗證了提出的上肢機器人專用faulhaber電機系統能夠實現不同的訓練模式,可滿足需要,另一方面驗證了表面肌電控制方法與關節力矩阻抗控制方法的正確性。基于晶吻鰩的波動推進數值模擬及其實驗研究自然界中的生物經歷了千百萬年的大自然的洗禮,終進化為適應生存環境的生物,在這過程中取得了非凡的環境適應能力。因此,對自然界中的生物的研究和模仿,有助于提升人類的科學技術。

1224N012SR德瑪莎水光儀專用電機,
FAULHABER通過拉格朗日方程分析傳統重力平衡串聯水光儀專用faulhaber電機和未平衡串聯水光儀專用faulhaber電機動力學方程差異,可知添加彈簧能夠改善水光儀專用faulhaber電機動力學性能。改變彈簧剛度、安裝位置及角度中的任意參數均能調整水光儀專用faulhaber電機重力平衡效果。利用能量守恒原理推導出剛度矩陣形式的彈性勢能和重力勢能,并分析彈性剛度矩陣分量矩陣中元素符號和數值分布特性,以此為基礎總結出實現水光儀專用faulhaber電機重力平衡彈簧安裝的四個必要條件。然后,對影響水光儀專用faulhaber電機重力平衡的因素進行理論分析,結果表明彈簧安裝方式對重力平衡效果影響顯著。
FAULHABER根據重力平衡控制系統特點,采用PID控制方案建立了直流伺服faulhaber電機的控制系統數學模型,并利用該模型在MATLAB/Simulink中進行了仿真,仿真結果表明重力平衡明顯提升了控制系統動態性能。設計了等比例縮小雙關節水光儀專用faulhaber電機虛擬樣機,并在ADAMS中對水光儀專用faulhaber電機在不同末端負載情況下進行了多組動力學仿真,仿真結果與本文基于剛度矩陣所建立的重力平衡理論結果吻合。后,以雙關節水光儀專用faulhaber電機虛擬樣機為基礎搭建了雙關節水光儀專用faulhaber電機重力平衡實驗平臺,用LABVIEW設計了實驗平臺上位機,并對雙關節伺服faulhaber電機進行了調試。
1224N012SR德瑪莎水光儀專用電機
利用虛擬RGB-D相機采集圖像,完成ORB和模板匹配算法的目標識別。利用規劃場景與碰撞檢測,完成LBT-RRT高維空間運動規劃算法驗證實驗。利用運動規劃庫Move It!和物理仿真環境Gazebo,完成機器人專用faulhaber電機自主抓取目標物體的仿真實驗。搭建機器人專用faulhaber電機綜合實驗平臺,驗證機器人專用faulhaber電機的抓取能力。首先,進行機器人專用faulhaber電機與相機的手眼標定實驗,確定RGB-D相機Kinect V2與機器人專用faulhaber電機的關系;然后,進行目標識別和6D位姿估計實驗,完成目標識別和位姿輸出;進行LBT-RRT運動規劃驗證試驗,保證抓取目標的順利進行;后,進行機器人專用faulhaber電機抓取操作綜合實驗,完成對多個不同形狀大小物體的抓取。
在特征降維方面,從分類的角度,提出了基于類別鄰域的Isomap降維方法(Category Neighbor-Isomap,CN-Isomap),在特征降維過程中利用樣本的類別信息來保持原樣本之間固有的幾何結構關系,實現準確降維。關于動態手勢識別,通過分析現有識別算法的特點和自然人機交互過程中的動態手勢特性,提出了基于時間軸壓縮的手勢時空建模方法,以手勢的時空差異性,同時也是為了能夠在此建模的基礎上識別由不同用戶在不同視角下作出的手勢。根據動態手勢的運動特性,提出了速率邊沿檢測算法來分割手勢的起止過程,通過跟蹤圖像平面內的手勢運動,得到表征手勢的一系列離散軌跡點。基于格式塔心理學的知覺定律,采用3次條擬合出手勢的表觀軌跡。
(4)水下滑翔器內部機械結構的設計。在外形尺寸的基礎上,對四個模塊-耐壓外殼體、姿態調整機構、浮力驅動機構、尾舵機構分別進行設計,并驗證設計的強度與參數設計的合理性。"輸電線路巡檢機器人專用faulhaber電機智能控制系統研究與設計輸電線路巡檢機器人專用faulhaber電機能夠代替人工進行線路巡檢工作,提高線路巡檢工作的效率和精度,具有較高的經濟效益。因而,積極研制性能可靠的巡檢機器人專用faulhaber電機具有重要的實用價值。本文以新型巡檢機器人專用faulhaber電機機械本體為控制對象,研究開發了能實現巡檢機器人專用faulhaber電機自主行走和自主越障的智能控制系統。本文通過研究分析機器人專用faulhaber電機行走與越障動作原理,確定控制系統的功能要求。