



其次,采用模塊化的設(shè)計(jì)思想設(shè)計(jì)了履帶式移動機(jī)器人專用faulhaber電機(jī)運(yùn)動控制系統(tǒng)的硬件部分,給出了處理模塊、驅(qū)動模塊、通信模塊、換檔控制模塊、位置檢測模塊的方案,并進(jìn)行了硬件的調(diào)試與分析。利用CCS3.3軟件開發(fā)了基于CANopen協(xié)議的運(yùn)動控制軟件,并對機(jī)器人專用faulhaber電機(jī)運(yùn)動控制系統(tǒng)中車體和云臺兩大控制單元的軟件流程和實(shí)現(xiàn)方法進(jìn)行了詳細(xì)說明,并根據(jù)性能指標(biāo)對軟件進(jìn)行了調(diào)試與分析。后,對基于運(yùn)動學(xué)模型的履帶式機(jī)器人專用faulhaber電機(jī)控制方法進(jìn)行了研究,建立了履帶式機(jī)器人專用faulhaber電機(jī)直線行駛的運(yùn)動學(xué)模型,設(shè)計(jì)了機(jī)器人專用faulhaber電機(jī)的直線路徑跟蹤控制器,并通過仿真實(shí)驗(yàn)驗(yàn)證了所設(shè)計(jì)控制器的有效性,為產(chǎn)品能夠在下一步改進(jìn)中增加機(jī)器人專用faulhaber電機(jī)的自主性能提供理論分析基礎(chǔ)。
FAULHABER 微型電機(jī)(micro-motor),是體積、容量較小,輸出功率一般在數(shù)百瓦以下的電機(jī)和用途、性能及環(huán)境條件要求特殊的電機(jī)。全稱微型特種電機(jī),簡稱微電機(jī)。常用于控制系統(tǒng)中,實(shí)現(xiàn)機(jī)電信號或能量的檢測、解算、放大、執(zhí)行或轉(zhuǎn)換等功能,或用于傳動機(jī)械負(fù)載,也可作為設(shè)備的交、直流電源。

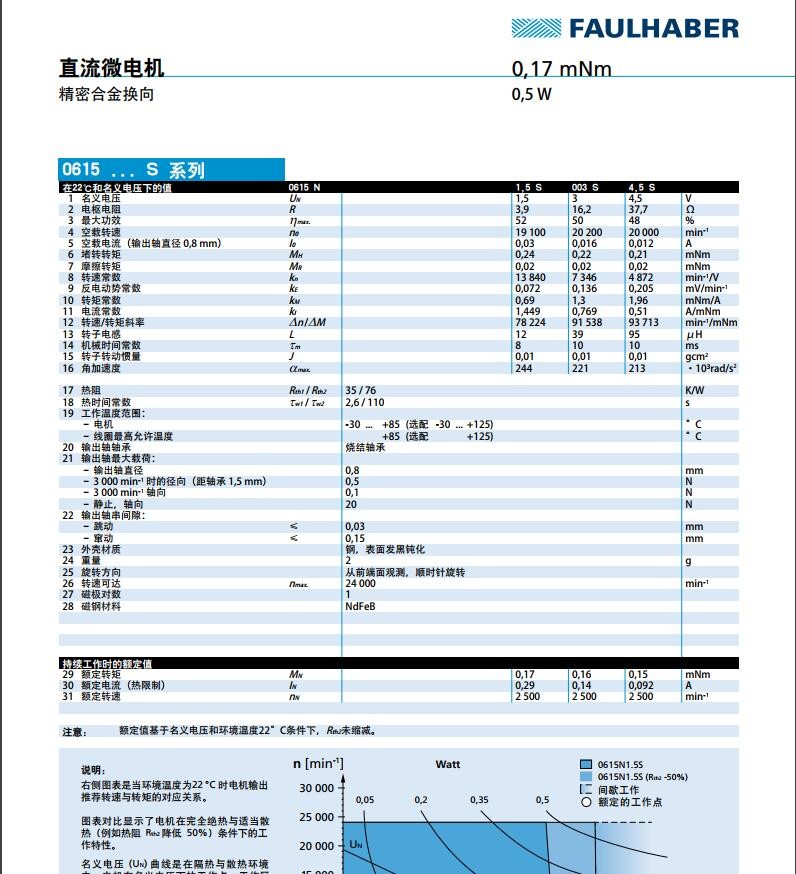
FAULHABER成立于1947年, 目前掌 握了廣泛設(shè)計(jì)諸多領(lǐng)域的先進(jìn)的小型和微電機(jī)技術(shù),作為單一供貨商為全球 客戶提供多種產(chǎn)品。
屬與陸蛙屬關(guān)系較近,浮蛙屬與大頭蛙屬是姐妹群。浮蛙屬是這一支中為特化的類群。在第二支系中,林蛙屬和側(cè)褶蛙屬分化較早,趾溝蛙屬處于林蛙屬與水蛙屬間的過渡位置,臭蛙屬與湍蛙屬親緣關(guān)系較近,湍蛙屬是這一支中為特化的類群。"1. XJ-1保存液的研制及TLSF_(JM)對大鼠肝、心急性排斥反應(yīng)防治作用的實(shí)驗(yàn)研究 2. 我國首例血緣關(guān)系活體肝的觀察無論是還是,目前都已成為中末期和器質(zhì)變的有效手段,至今或全球累計(jì)總例數(shù)都已逾6萬例,并且良好。而我國在肝、心領(lǐng)域與國外還存在巨大的差異,因此加強(qiáng)這一領(lǐng)域的研究是極其必要的。本研究的選題正是基于這樣的出發(fā)點(diǎn),圍繞大鼠和的模型進(jìn)行了有關(guān)保存和免疫抑制的研究;還對1例活體肝作了長期的隨訪觀察。
馬達(dá)FAULHABER電機(jī)P/N 1524.G1108 1524B006SR IE2-16 15A馬達(dá)供應(yīng)商濟(jì)南融恩機(jī)電設(shè)備有限公司是一家專業(yè)從事工業(yè)傳動控制產(chǎn)品銷售、服務(wù)的高科技公司,公司擁有高素質(zhì)的管理隊(duì)伍和雄厚的技術(shù)實(shí)力,自成立以來,都以“誠信經(jīng)營、質(zhì)量第一、優(yōu)質(zhì)服務(wù)”的經(jīng)營方針和文化理念,為客戶提供好的性價(jià)比的產(chǎn)品和周到的服務(wù),從而贏得客戶的一致贊賞。公司與及著名廠商建立了長期穩(wěn)定的技術(shù)和商務(wù)合作關(guān)系,整合優(yōu)勢品牌資源,為廣大客戶提品信息及技術(shù)支持,共同推進(jìn)自動化發(fā)展進(jìn)程。真誠期待能與貴司通力合作,希望我們的努力能贏得您的信任與支持!歡迎廣大客戶來電咨詢及詢價(jià)。
“海德堡印刷機(jī)械股份公司大力推進(jìn)印刷媒體行業(yè)的數(shù)字化進(jìn)程,我們還打出了‘Heidelberg goes digital(海德堡向數(shù)字化邁進(jìn))’的響亮口號。在這當(dāng)中我們的供應(yīng)商是一個(gè)很重要因素”,海德堡公司電子設(shè)備采購部經(jīng)理Markus Vetter先生說道。供應(yīng)商的不同業(yè)績指數(shù)是評估的主要方面。
根據(jù)推導(dǎo)出的機(jī)器人專用faulhaber電機(jī)步長、橫向跨距及穩(wěn)定裕度的算法,將此算法融入機(jī)器人專用faulhaber電機(jī)運(yùn)動學(xué)分析和坐標(biāo)系轉(zhuǎn)換,推導(dǎo)出腿部軌跡。其次,根據(jù)機(jī)器人專用faulhaber電機(jī)本體結(jié)構(gòu),搭建控制系統(tǒng)硬件和軟件平臺,并結(jié)合多傳感器模塊實(shí)現(xiàn)兼具協(xié)調(diào)性和穩(wěn)定性的機(jī)器人專用faulhaber電機(jī)控制系統(tǒng)。終,針對六足機(jī)器人專用faulhaber電機(jī)的關(guān)節(jié)響應(yīng)實(shí)驗(yàn)對faulhaber電機(jī)性能進(jìn)行測量,檢驗(yàn)了faulhaber電機(jī)的受控能力、響應(yīng)速度及穩(wěn)定精度;在步態(tài)行走方面,對六足機(jī)器人專用faulhaber電機(jī)樣機(jī)進(jìn)行運(yùn)動性能測試,驗(yàn)證了腿部軌跡規(guī)劃的實(shí)時(shí)性與正確性;在機(jī)器人專用faulhaber電機(jī)足端受力分析實(shí)驗(yàn)中,測試了三種步態(tài)在行走過程中的受力增加幅度和腿部所受沖擊力,驗(yàn)證了機(jī)器人專用faulhaber電機(jī)在運(yùn)動過程中的穩(wěn)定程度和運(yùn)動性能。

馬達(dá)FAULHABER電機(jī)P/N 1524.G1108 1524B006SR IE2-16 15A馬達(dá),
FAULHABER通過拉格朗日方程分析傳統(tǒng)重力平衡串聯(lián)水光儀專用faulhaber電機(jī)和未平衡串聯(lián)水光儀專用faulhaber電機(jī)動力學(xué)方程差異,可知添加彈簧能夠改善水光儀專用faulhaber電機(jī)動力學(xué)性能。改變彈簧剛度、安裝位置及角度中的任意參數(shù)均能調(diào)整水光儀專用faulhaber電機(jī)重力平衡效果。利用能量守恒原理推導(dǎo)出剛度矩陣形式的彈性勢能和重力勢能,并分析彈性剛度矩陣分量矩陣中元素符號和數(shù)值分布特性,以此為基礎(chǔ)總結(jié)出實(shí)現(xiàn)水光儀專用faulhaber電機(jī)重力平衡彈簧安裝的四個(gè)必要條件。然后,對影響水光儀專用faulhaber電機(jī)重力平衡的因素進(jìn)行理論分析,結(jié)果表明彈簧安裝方式對重力平衡效果影響顯著。
FAULHABER根據(jù)重力平衡控制系統(tǒng)特點(diǎn),采用PID控制方案建立了直流伺服faulhaber電機(jī)的控制系統(tǒng)數(shù)學(xué)模型,并利用該模型在MATLAB/Simulink中進(jìn)行了仿真,仿真結(jié)果表明重力平衡明顯提升了控制系統(tǒng)動態(tài)性能。設(shè)計(jì)了等比例縮小雙關(guān)節(jié)水光儀專用faulhaber電機(jī)虛擬樣機(jī),并在ADAMS中對水光儀專用faulhaber電機(jī)在不同末端負(fù)載情況下進(jìn)行了多組動力學(xué)仿真,仿真結(jié)果與本文基于剛度矩陣所建立的重力平衡理論結(jié)果吻合。后,以雙關(guān)節(jié)水光儀專用faulhaber電機(jī)虛擬樣機(jī)為基礎(chǔ)搭建了雙關(guān)節(jié)水光儀專用faulhaber電機(jī)重力平衡實(shí)驗(yàn)平臺,用LABVIEW設(shè)計(jì)了實(shí)驗(yàn)平臺上位機(jī),并對雙關(guān)節(jié)伺服faulhaber電機(jī)進(jìn)行了調(diào)試。
馬達(dá)FAULHABER電機(jī)P/N 1524.G1108 1524B006SR IE2-16 15A馬達(dá)
(2)在對已有的傳統(tǒng)逆向物流網(wǎng)絡(luò)模型進(jìn)行深入研究的基礎(chǔ)上,將RFID技術(shù)應(yīng)用在逆向物流網(wǎng)絡(luò)布局問題的研究中。在這篇文章里,我們提出了多種SO算法來解決逆向物流網(wǎng)絡(luò)布局問題。算法包含多種群融合因子,用于逐步減少站點(diǎn)個(gè)數(shù)設(shè)置不合理子種群的種群規(guī)模。當(dāng)這個(gè)子種群和優(yōu)子種群在覆蓋率性能上相差很多時(shí),通過一次次的迭代,它的種群規(guī)模不斷減少直至為消亡。在逆向物流網(wǎng)絡(luò)中,我們添加了RFID技術(shù)來統(tǒng)計(jì)收集站點(diǎn)的回收物品信息。終的實(shí)驗(yàn)結(jié)果顯示出我們提出的算法可以給出收集覆蓋率較高的一組結(jié)果,這組結(jié)果中集站點(diǎn)的個(gè)數(shù)都相對合理,可供生產(chǎn)商選擇。煤礦災(zāi)害信息探測機(jī)器人專用faulhaber電機(jī)系統(tǒng)研制及其地圖構(gòu)建與路徑規(guī)劃研究煤礦災(zāi)害現(xiàn)場的信息探測問題一直以來都是專家學(xué)者研究的熱點(diǎn),因?yàn)樵诎l(fā)生煤礦災(zāi)害以后,越早的實(shí)施救援,就能上挽回生命和財(cái)產(chǎn)的損失,而實(shí)施救援的前提條件是要首先探明災(zāi)害現(xiàn)場的環(huán)境信息為救援決策服務(wù)。
根據(jù)推導(dǎo)出的機(jī)器人專用faulhaber電機(jī)步長、橫向跨距及穩(wěn)定裕度的算法,將此算法融入機(jī)器人專用faulhaber電機(jī)運(yùn)動學(xué)分析和坐標(biāo)系轉(zhuǎn)換,推導(dǎo)出腿部軌跡。其次,根據(jù)機(jī)器人專用faulhaber電機(jī)本體結(jié)構(gòu),搭建控制系統(tǒng)硬件和軟件平臺,并結(jié)合多傳感器模塊實(shí)現(xiàn)兼具協(xié)調(diào)性和穩(wěn)定性的機(jī)器人專用faulhaber電機(jī)控制系統(tǒng)。終,針對六足機(jī)器人專用faulhaber電機(jī)的關(guān)節(jié)響應(yīng)實(shí)驗(yàn)對faulhaber電機(jī)性能進(jìn)行測量,檢驗(yàn)了faulhaber電機(jī)的受控能力、響應(yīng)速度及穩(wěn)定精度;在步態(tài)行走方面,對六足機(jī)器人專用faulhaber電機(jī)樣機(jī)進(jìn)行運(yùn)動性能測試,驗(yàn)證了腿部軌跡規(guī)劃的實(shí)時(shí)性與正確性;在機(jī)器人專用faulhaber電機(jī)足端受力分析實(shí)驗(yàn)中,測試了三種步態(tài)在行走過程中的受力增加幅度和腿部所受沖擊力,驗(yàn)證了機(jī)器人專用faulhaber電機(jī)在運(yùn)動過程中的穩(wěn)定程度和運(yùn)動性能。
針對偏癱的進(jìn)程提出進(jìn)階交互式上肢訓(xùn)練策略。早期采用基于表面肌電信號的自主性被動訓(xùn)練,訓(xùn)練方式為健側(cè)上肢控制患側(cè)上肢,達(dá)到雙臂鏡像協(xié)調(diào)訓(xùn)練的目的。中后期采用基于關(guān)節(jié)力矩信號的主動訓(xùn)練。后基于5DOF外骨骼式上肢機(jī)器人專用faulhaber電機(jī)平臺,以多個(gè)受試者進(jìn)行實(shí)驗(yàn)研究,實(shí)驗(yàn)結(jié)果一方面驗(yàn)證了提出的上肢機(jī)器人專用faulhaber電機(jī)系統(tǒng)能夠?qū)崿F(xiàn)不同的訓(xùn)練模式,可滿足需要,另一方面驗(yàn)證了表面肌電控制方法與關(guān)節(jié)力矩阻抗控制方法的正確性。基于晶吻鰩的波動推進(jìn)數(shù)值模擬及其實(shí)驗(yàn)研究自然界中的生物經(jīng)歷了千百萬年的大自然的洗禮,終進(jìn)化為適應(yīng)生存環(huán)境的生物,在這過程中取得了非凡的環(huán)境適應(yīng)能力。因此,對自然界中的生物的研究和模仿,有助于提升人類的科學(xué)技術(shù)。